Некие Thiemo и Alexis из Института искусственного интеллекта Бременского университета создали набор инструментов, поддерживающих вторую версию сенсора Kinect. Эти инструменты включают:
- интерфейс к ROS для сенсора (драйвер) используя libfreenect2
- встроенные/внешние инструменты калибровки
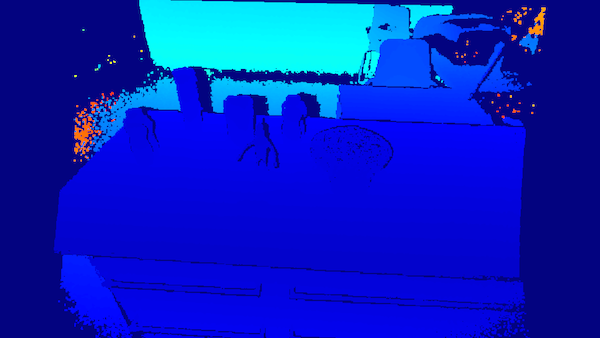
- усовершенствованный метод записи глубины сцены, используя библиотеку OpenCV
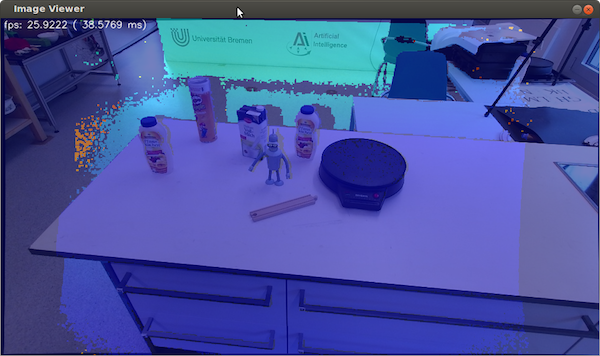
- облегченный просмоторщик облака точек/изображений, основанный на визуализаторе PCL и OpenCV
Система была разработана и протестирована для версий ROS Hydro и Indigo (Ubuntu 12.04 и 14.04) .
Драйвер был улучшен, и позволяет достичь высокой производительности, и может обрабатывать информацию сенсора Kinect v2 при полной частоте кадров (30 Гц) на приемлемом оборудования (а не только на high-end машинах). Это было достигнуто путем распараллеливания конвейера изображения. Эти ребята также позаботились о том, чтобы иметь возможность передавать полные данные в сжатом виде на другие ПК (30Гц данных требует скорости сети около 40 Мегабайт/с).
Также понадобится немного исправленная версия libfreenect2, как указано на README, которую можно взять здесь.
Ниже приведены скриншоты инструментов.


[add_ratings]
Еще по этой теме
 Microsoft анонсировал 3D-камеру «Проект Kinect для Azure»
Microsoft анонсировал 3D-камеру «Проект Kinect для Azure»  Робот Watch-Bot помогает рассеянным людям
Робот Watch-Bot помогает рассеянным людям Arduino в качестве подписчика ROS
Arduino в качестве подписчика ROS Первый скетч для Kinect
Первый скетч для Kinect Arduino как издатель ROS
Arduino как издатель ROS Arduino и ROS — первый шаг
Arduino и ROS — первый шаг Библиотеки Processing для управления камерой
Библиотеки Processing для управления камерой NavViz представила новую технологию масштабного картрирования
NavViz представила новую технологию масштабного картрирования ROS на практике
ROS на практике Сообщество ROS
Сообщество ROS
Самое полезное на вашем блоге на мой взгляд информация о ROS и информация о Kinect. Решил для себя — буду покупать Kinect 2 и экспериментировать))
У меня в планах осветить еще много тем, связанных с Kinect и ROS, я обязательно продолжу публиковать описание своих экспериментов с этим сенсором и фреймворком. Второй Кинект только в ближайшее время купить проблематично — нет его пока у нас в продаже в виде отдельного устройства (только в комплекте с приставками). А так вторая версия намного продвинутее — в первом использовалась технология структурированного света (здесь подробнее robotosha.ru/robotics/str...ight-kinect.html), во второй версии уже time-Of-flight (robotosha.ru/robotics/poi...e-of-flight.html). Это дает большую точность.
Не ебэе можно купить и отдельно и вместе, и новый и бушный. Например www.ebay.com/itm/OFFICIAL...h=item2a449da733
А нет, ошибся, только бушные, но это меня не смущает. Смущает то что похоже еще нужен блочек питания специальный.
БП нужен (ток 1.6А нужен, встроенные в компьютеры USB такой не дают). Вместе с блоком питания сенсор поставляется только в виде отдельного устройства (версия и для Windows-в два раза дороже и для XBox), хотя можно купить его и отдельно (правда, для Kinect 2 мне пока не попадался, а на первом разъем не такой). Можно свой соорудить — там нужно +5В, +12В, штекеры родные отрезать и заменить их на стандартные USB. Я как-нибудь статейку про подключение Kinect к компьютеру напишу.