
Сегодня я начну изучение библиотеки rosserial, которая позволяет использовать Arduino в качестве узла ROS. Вместе с библиотекой идут многочисленные примеры, и, конечно же, первый из рассмотренных будет HelloWorld. Этот пример публикует используя Arduino тему ROS с фразой «hello world!».
В Arduino IDE открываем пример HelloWorld, найдя его в меню Файл → Примеры → ros_lib → HelloWorld. В открывшемся окошке перед нами предстает следующий код:
/*
* rosserial Publisher Example
* Prints "hello world!"
*/
#include <ros.h>
#include <std_msgs/String.h>
ros::NodeHandle nh;
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);
char hello[13] = "hello world!";
void setup()
{
nh.initNode();
nh.advertise(chatter);
}
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg );
nh.spinOnce();
delay(1000);
}Частью каждой Arduino-программы, работающей совместно с ROS является заголовочный файл ros.h, а также заголовочные файлы сообщений, которые мы будем использовать
#include <ros.h> #include <std_msgs/String.h>
Далее, нам необходимо создать экземпляр обработчика узла, который позволяет нашей программе создавать издателей (publishers) и подписчиков (subscribers). Обработчик узла также заботится о передачи данных по последовательному порту.
ros::NodeHandle nh;
Мы должны создать экземпляры издателей и подписчиков, которых мы будем использовать. Здесь мы создаем экземпляр Publisher с названием темы «chatter». Вторым параметром Publisher является ссылка на экземпляр сообщения, которое будет публиковаться.
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);В функции setup () нам необходимо инициализировать обработчик ROS для информирования о любых публикуемых темах, а также для подписки на темы.
void setup()
{
nh.initNode();
nh.advertise(chatter);
}Наконец, в функции loop () узел публикует «hello world!» и вызывает ros::spinOnce () в которой происходит обработка всех обратных вызовов для соединений.
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg );
nh.spinOnce();
delay(1000);
}Загружаем скетч в Arduino.
После того, как скетч успешно загрузится, открываем окно Терминала Linux и запускаем в нем ROS, выполнив
$ roscore
Далее, в новом окне или вкладке Терминала запускаем клиентское приложение rosserial, которое будет перенаправлять сообщения Arduino в ROS. Убедитесь, что указываете правильный последовательный порт:
$ rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0
Наконец, наблюдаем приветственное сообщение Arduino, выполнив опять же в новом окошке Терминала:
$ rostopic echo chatter
Я записал небольшое видео, в котором показал все вышеописанные шаги по использованию Arduino в качестве издателя ROS.
[add_ratings]
Еще по этой теме
 Arduino в качестве подписчика ROS
Arduino в качестве подписчика ROS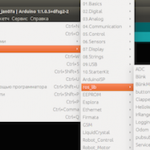 Arduino и ROS — первый шаг
Arduino и ROS — первый шаг Прерывания на Arduino
Прерывания на Arduino Часы реального времени (RTC) и Arduino
Часы реального времени (RTC) и Arduino Оптимизируем digitalWrite на Arduino
Оптимизируем digitalWrite на Arduino Многозадачность и прерывания на Arduino
Многозадачность и прерывания на Arduino Многозадачность на Arduino
Многозадачность на Arduino Видеоурок 6. Serial и Processing
Видеоурок 6. Serial и Processing Видеоурок 4. Аналоговые входы Arduino
Видеоурок 4. Аналоговые входы Arduino Видеоурок 3. Основы схемотехники
Видеоурок 3. Основы схемотехники