
Технология, используемая для формирования трехмерного изображения в Kinect называется 3D-сканированием структурированного света. Этот метод широко используется в промышленности, например, для контроля производства и измерения объема, и включает в себя высокоточные и дорогие сканеры. Сенсор Kinect стал первым устройством в потребительском сегменте, где был реализован этот метод.
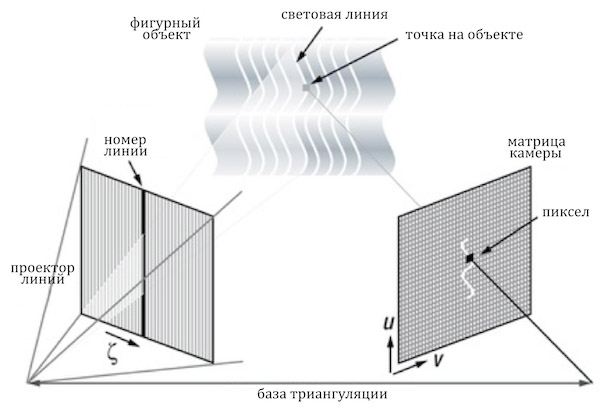
Большинство сканеров структурированного света основано на проекции узкой полоски света на 3D-объект. Наблюдая из точки, отличной от источника, формирующего полосу, и используя деформацию этой полосы, вызванное различным преломлением луча из-за криволийности поверхности, в камере измеряется расстояние от каждой точки и, таким образом, воссоздается 3D-объем. Если проецировать в одно и то же время несколько световых полос, то мы получим большое число образцов одновременно.
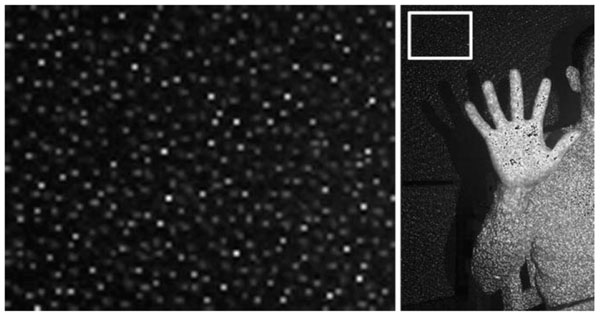
Система Kinect'а несколько отличается от используемой в промышленности. Вместо проецирования видимых световых линий, в Kinect ИК-проектор посылает образец инфракрасных лучей (так называемое кодированное ИК-изображение), которые, отражаясь от объектов, принимаются с помощью стандартного CMOS-датчика изображения.
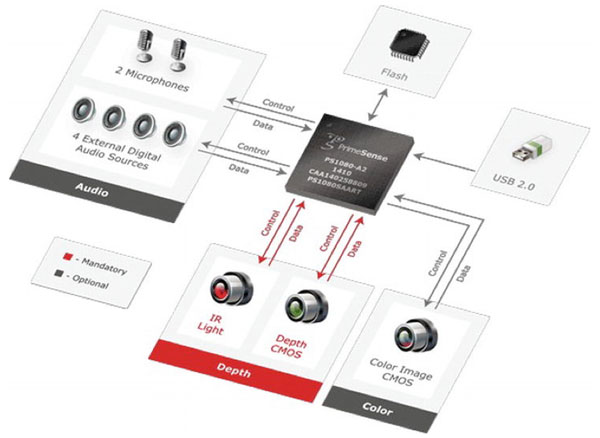
Это захваченное изображение передается на специализированную микросхему PrimeSense, где преобразуется в изображение глубины сцены.
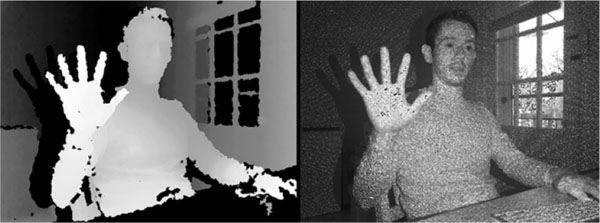
После получения кодированного инфракрасного изображения, в микросхеме PrimeSense PS1080 оно сравнивается с эталоном, хранящимся в памяти. Этот эталон получают на этапе калибровки при производстве чипа. Результат сравнения «плоского» эталона и входящего инфракрасного изображения переводится в глубину изображения сцены с VGA-разрешением, к которому можно получить доступ через API OpenNI.
[add_ratings]
Еще по этой теме
 Microsoft анонсировал 3D-камеру «Проект Kinect для Azure»
Microsoft анонсировал 3D-камеру «Проект Kinect для Azure»  Робот Watch-Bot помогает рассеянным людям
Робот Watch-Bot помогает рассеянным людям Первый скетч для Kinect
Первый скетч для Kinect Библиотеки Processing для управления камерой
Библиотеки Processing для управления камерой Библиотеки Processing для работы с Kinect
Библиотеки Processing для работы с Kinect Драйвера и фреймворки Kinect
Драйвера и фреймворки Kinect Изображения и пиксели
Изображения и пиксели Драйвер Kinect 2 для ROS
Драйвер Kinect 2 для ROS- Сенсор Microsoft Kinect
 Вышла Arduino IDE 1.6.3
Вышла Arduino IDE 1.6.3