
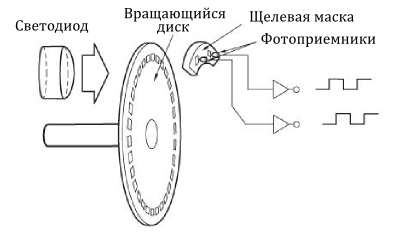
Первые оптические энкодеры были разработаны в середине 1940-х годов «Фортепианной компанией Болдуина» для использования в качестве «тоновых колес», которые позволяли электрическим органам имитировать другие музыкальные инструменты. Современные устройства в основном представляют собой миниатюрные версии датчика приближения с использованием прерывания света. В энкодере сфокусированный луч света, направлен на совмещенный с излучателем фотоприемник, периодически прерывается вращающимся диском, расположенным между приемником и передатчиком света и закрепленный на валу контролируемого объекта. Диск может быть непрозрачным с отверстиями, либо прозрачным с нанесенным на него кодированным рисунком. По сравнению с более сложными преобразователями переменного тока, это простая схема кодирования реализует, по существу, цифровой вывод результатов с оптических датчиков в недорогой надежной конструкции с хорошей помехоустойчивостью.
Есть два основных типа оптических энкодеров: инкрементные и абсолютные. Инкрементный энкодер измеряет скорость вращения и может выдать относительное положение, в то время как абсолютный энкодер измеряет непосредственно угловое положение и на выходе дает скорость. Если не принимать во внимание изменение информации о местоположении, то с инкрементным энкодером, как правило, легче работать и он обеспечивает эквивалентное разрешение при гораздо более низкой стоимости, чем абсолютные оптические энкодеры.
Инкрементный оптический энкодер
Оптические поворотные инкрементные энкодеры, еще их называют датчиками угла поворота, стали наиболее популярным устройством для измерения угловой скорости и положения в моторах, на валу колеса или рулевого механизма. В мобильных роботах, энкодеры используются для контроля положения или скорости колес и других, управляемых при помощи моторов соединений. Из-за того, что энкодеры являются проприоцептивными датчиками, их оценка положения является лучшей в системе координат робота и, при решении задачи локализации робота (см. слайды «Проблема локализации мобильного робота»), требуются значительные поправки.
Простейшим типом инкрементного энкодера является одноканальный тахометр, обычно состоящий из механического прерывателя света, производящего определенное количество прямоугольных или синусоидальных импульсов, при каждом обороте вала. Увеличение числа импульсов увеличивает разрешение (и стоимость) модуля. Разрешение энкодера измеряется в числе отсчетов на оборот (CPR, cycles per revolution). Минимальное угловое разрешение легко вычислить по величине CPR. Типичный энкодер в мобильной робототехнике имеет значение 2000 CPR, в то же время промышленный оптический энкодер может иметь параметр CPR равный 10000. С точки зрения требуемого диапазона, конечно же важно, чтобы энкодер был достаточно быстрым, чтобы успевать считывать значения на предполагаемой скорости вращения. Промышленные оптические энкодеры полностью удовлетворяют требованиям, предъявляемым в робототехнических приложениях.
Эти, относительно недорогие устройства используются в качестве датчиков скорости в цепи обратной связи в системах управления, работающих на средних и высоких скоростях, но на очень малых скоростях чувствительны к шумам и проблемам со стабилизацией из-за ошибок квантования. Здесь нужно искать компромисс между разрешением и скоростью обновления: улучшенная переходная характеристика требует большей скорости обновления, которая для данного числа линий уменьшает число возможных импульсов энкодера для интервала дискретизации.
В дополнение к нестабильности на низких скоростях, одноканальный тахометр также неспособен определять направление вращения и, следовательно, не может быть использован в качестве датчика положения. Квадратурные энкодеры, преодолели эти проблемы путем добавления второго канала, смещенного относительно первого, поэтому результирующие последовательности импульсов сдвинуты по фазе на 90 градусов, как показано на рисунке ниже. Этот метод позволяет декодирующей электронике определить, какой канал опережает другой и, следовательно, установить направление вращения. Кроме того, четыре детектируемых различных состояния увеличивают разрешение в четыре раза без изменения диска прерывателя. Таким образом, энкодер, имеющий 2000 CPR выдаст при квадратурной реализации даст уже 8000 отсчетов. Дальнейшее улучшение возможно путем измерения синусоидальной волны с помощью оптического детектора и выполнения сложной интерполяции. Такие методы, хотя и редко используемые в мобильной робототехнике, могут дать 1000-кратное увеличение разрешения.
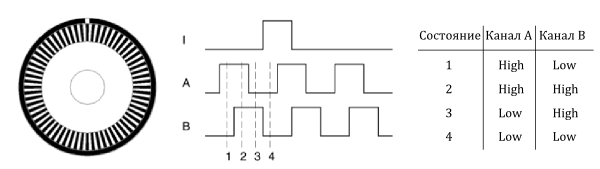
Следствием инкрементного характера фазо-квадратурных выходных сигналов является то, что любое разрешение углового положения может быть выражено не в абсолютной форме, а только относительно некоторой опорной точки. Создание такой точки отсчета может быть произведено несколькими способами. Для приложений, включающих непрерывное вращение на 360 градусов, большинство энкодеров включает в качестве третьего канала специальный индексный выход, который переходит в высокое состояние на каждом полном обороте вала. Промежуточные положения вала затем определяются числом, на которое увеличился, или уменьшился счетчик импульсов от этого известного индексированного положения. Одним из недостатков такого подхода является потеря информации об относительном положении в случае сбоя питания.
В случае ограниченного вращения, такого как возвратно-поступательное движение вдоль направляющих (как в станках с ЧПУ) можно использовать электрические концевые выключатели и/или механические ограничители для задания исходного положения. Для улучшения повторяемости, возврат в исходное положение разбивается на два этапа. Ось вращается с пониженной скоростью в соответствующем направлении до тех пор, пока не встретится механизм остановки, после чего происходит обраткое вращение в течение предопределенного короткого промежутка времени. Вал вращается медленно обратно до остановки на заданной медленной скорости из этой заданной начальной точки, тем самым, устраняя любые изменения в инерциальной нагрузке, которые могли бы повлиять на окончательное исходное положение. Этот двухэтапный подход используется, например, при старте шагового двигателя для инициализации позиционирования печатающей головки в принтерах.
С другой стороны, функция абсолютного индексирования может быть основана на каком-то внешнем действии по созданию опорной точки, которое отделено от цикла непосредственного сервоуправления. Хорошей иллюстрацией этой ситуации служит инкрементный датчик, используемый для отслеживания угла рулевого управления платформы. Например, когда робот включается в первый раз, абсолютный угол рулевого управления неизвестен и должен быть инициализирован, используя «привязку» действия к маякам на док-станции, соседней стене, или какой-либо другой идентифицирующий набор ориентиров. Увеличение или уменьшение значения счетчика электронного декодера используется для изменения регистра направления транспортного средства в относительной форме.
Как и большинство проприоцептивных датчиков, энкодеры, как правило, находятся в контролируемой среде внутренней структуры мобильного робота, и поэтому систематическая ошибка и кросс-чувствительность могут быть устранены. Точность оптических датчиков часто предполагается равной 100%, и, хотя это может быть не совсем корректно, какие-либо ошибки оптического датчика являются незначительными ошибками по сравнению с тем, что происходит за валом двигателя.
Абсолютный оптический энкодер
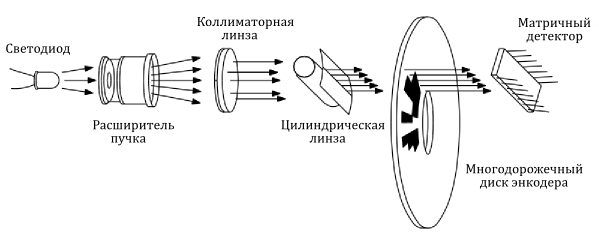
Абсолютные энкодеры обычно используются в приложениях с медленным вращением в которых недопустима потенциальная потеря информации о положении. Элементы дискретного детектора в фотоэлектрической матрице индивидуально совмещены с концентрическими дорожками на светопрерывателе, создавая эффект бесконтактной реализации энкодера с щеточными контактами. Назначение отдельной дорожки для каждого бита результирующего разрешения приводит к дискам большего размера (по сравнению с конструкцией инкрементного энкодера) и соответствующему снижению допустимого отклонения при ударе и вибрации. При этом каждая дополнительная дорожка энкодера удваивает разрешение, но учетверяет стоимость датчика.
Вместо последовательного потока битов, как в инкрементном датчике, абсолютные оптические энкодеры обеспечивают параллельный вывод слова данных с уникальным кодом шаблона для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование. Характерной особенностью кода Грея (по имени изобретателя Франка Грея из Bell Labs) является то, что только один бит изменяется за раз, помогая избежать тем самым асинхронных неоднозначностей, обусловленными электронными и механическими допусками элементов. С другой стороны, двоичный код постоянно включает множество измененных битов при увеличении или уменьшении счета на единицу. Например, при переходе из положения 255 в положение 0, восемь бит меняются с 1 в 0. Так как нет никакой гарантии, что все пороговые детекторы, являющиеся элементами слежения детектора сработают одновременно, в момент перехода будет присутствовать значительная неопределенность в данной схеме кодирования. Поэтому требуется дополнительный сигнал подтверждения правильности данных, если больше чем один бит изменился между последовательными положениями энкодера.
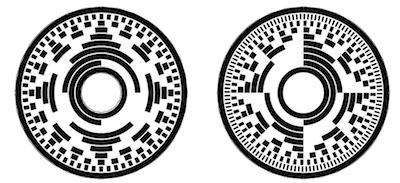
На рисунке слева поворот против часовой стрелки на одну позицию становится причиной изменения только одного бита. На рисунке справа такой же поворот двоично-кодированного диска станет причиной изменения всех битов в частном случае (с 255 в 0) иллюстрируя тем самым опорную линию на 12 часов.
Абсолютные энкодеры лучше всего подходят для медленных и/или редких поворотов, таких как кодирование угла поворота рулевого колеса, в отличие от измерения высокоскоростного непрерывного (например, ведущее колесо) вращения, которое потребует вычисления смещения вдоль всего пути движения. Хотя и не столь надежны как резольверы для высокотемпературных или в приложениях с высокой ударной стойкостью, абсолютные энкодеры могут работать при температурах свыше 125 градусов и средним разрешением (1000 отсчетов на оборот). Потенциальным недостатком абсолютных энкодеров является их параллельный вывод данных, который требует более сложного интерфейса из-за большего количества проводов. 13-битный абсолютный энкодер, использующий дополнительные выходные сигналы для помехоустойчивости потребует 28-жильный кабель (13 сигнальных пар плюс питание и заземление) вместо шести в случае с резольвером или инкрементным энкодером.
[add_ratings]
Еще по этой теме
 Комплект разработчика для камеры RealSense
Комплект разработчика для камеры RealSense Первый в мире «умный» 6-осевой датчик ИНС от Fairchild
Первый в мире «умный» 6-осевой датчик ИНС от Fairchild Дешевый LIDAR для автоматического торможения
Дешевый LIDAR для автоматического торможения LIDAR на чипе: быстрое и дешевое сканирование
LIDAR на чипе: быстрое и дешевое сканирование Робот телеприсутствия DORA дает невероятное ощущение реальности
Робот телеприсутствия DORA дает невероятное ощущение реальности Сенсор LIDAR за 100$
Сенсор LIDAR за 100$ Сенсор, который превратит ваш телефон в 3D-сканер
Сенсор, который превратит ваш телефон в 3D-сканер Новое шасси для Роботоши и колесные энкодеры DFRobot
Новое шасси для Роботоши и колесные энкодеры DFRobot Классификация датчиков
Классификация датчиков Самокалибровка при измерениях
Самокалибровка при измерениях
В универе на курсач проектировал абсолютный оптический энкодер. Для разрешения например всего 1 градус размеры отверстий становяться уж очень маленькими, это главный недостаток.