
Ведущий производитель высокопроизводительных решений на полупроводниках, компания Fairchild, объявила о запуске своего первого 6-осевого МЭМС-модуля инерциальной навигации (ИНС) FIS1100. Модуль интегрирует фирменный процессор для обработки движения AttitudeEngine с лучшими в классе алгоритмами объединения данных с 9-осевых сенсоров. Это позволяет разработчикам легко реализовывать решения на системном уровне. При этом, для приложений, работающих от автономных источников питания, реализован режим пониженного энергопотребления (потребление уменьшается в 10 раз) для широкого диапазона возможных движений. Это первый продукт компании в линейке МЭМС-сенсоров.
«Запуск первого МЭМС-продукта является важной вехой для компании Fairchild, поскольку мы взяли нашу уникальную разработку и производственный опыт и применили их к решению системного уровня, которое получилось очень мощным», - сказал председатель совета директоров и генеральный директор Fairchild Марк Томпсон. «Продвинутые алгоритмы и ноу-хау, полученные вследствие приобретения компании Xsens позволяют нам предоставлять нашим клиентам передовые решения в области обработки движения для быстро растущих сегментов рынков, таких как потребительский, промышленность и здравоохранение»
Модуль FIS1100 со встроенными процессорами обработки движения AttitudeEngine и объединения данных сенсоров XKF3, обладает низким энергопотреблением и является высокоточным системным решением для технологий, используемых в широком диапазоне приложений, таких как носимые датчики для занятий спортом, фитнесом и контроля за здоровьем; навигация пешеходов, автономные роботы; виртуальная и дополненная реальность.
«Отслеживание движения в потребительских устройствах быстро расширяется, начиная с игровых интерфейсов и смартфонов до множества новых приложений для Интернета двигающихся вещей», — говорит Джереми Бушо, директор и главный аналитик отделения MEMS&Sensors из IHS. «Разработчики смогут уйти в своих продуктах от обработки движения, наличие ИНС со встроенным процессором движения и завершенное программное решение, ускоряет время выхода на рынок, позволяя найти компромисс между миниатюрностью, длительным временем автономной работы и точностью отслеживания движения».
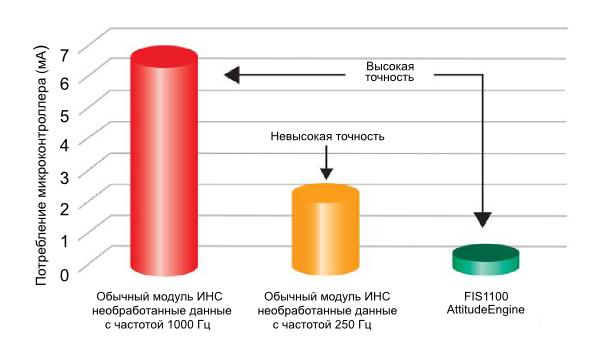
AttitudeEngine производит обработку 6-осевых инерциальных данных на высокой скорости внутри себя и выдает результат центральному процессору с уже более низкой частотой, соответствующей потребностям приложений, устраняя необходимость в высокочастотных прерываниях. Это позволяет процессору системы оставаться в спящем режиме дольше, обеспечивая потребителям большее время работы батареи без каких-либо компромиссов в функциональности и точности. Встроенные в XKF3 высокопроизводительные алгоритмы объединения данных с 9-осевых сенсоров, объединяют инерционные данные со встроенного гироскопа и акселерометра и данные с внешнего магнитометра. Объединение данных с сенсоров также включает в себя фоновую автокалибровку, что дает отличную производительность с точки зрения точности, согласованности и плавности. В сочетании с алгоритмами объединения данных с сенсоров XKF3, модуль FIS1100 является первой в мире завершенной потребительской ИНС с ориентационным (используя расчеты с кватернионами) заданием результатов, давая точность углов тангажа и крена на уровне ± 3° и точность рыскания ± 5°.
В FIS1100 используются собственные МЭМС-технологии Fairchild, разработанные специально для инерциальных датчиков. Технологический процесс включает в себя несколько элементов, дающих оптимальную производительность, размер и надежность. Они включают в себя передовую 60 мкм технологию с высокой плотностью межслойных переходных соединений и вертикальных электродов, а также однокристальные гироскоп и акселерометр с уникальной двойной вакуумной конструкцией.
Характеристики Firechild FIS1100
- 16-разрядный АЦП с широким динамическим диапазоном от ±32 град/сек до ±2560 град/сек для считывания угловой скорости и от ±2g до ±8g для линейного ускорения.
- Большой 1536-байтный FIFO-буфер может быть использован для буферизации данных сенсоров с 9 степенями свободы для снижения рассеиваемой мощности
- Малошумящий акселерометр: 50 микро g/√Гц и 0.1 (град/сек)/√Гц гироскоп
- Рабочая температура: от -45 ºС до + 85 ºС
- Встроенный датчик температуры
- Host-интерфейс с поддержкой I2C или SPI
- Ведущий I2C для обмена данными с внешним магнитометром
- Размеры корпуса: 3.3×3.3×1 мм
- Питание: 2.4-3.0 В
- Напряжение на входах/выходах: 1.62-1.98 В
Источник: Firechild
[add_ratings]
Еще по этой теме
 Комплект разработчика для камеры RealSense
Комплект разработчика для камеры RealSense Дешевый LIDAR для автоматического торможения
Дешевый LIDAR для автоматического торможения LIDAR на чипе: быстрое и дешевое сканирование
LIDAR на чипе: быстрое и дешевое сканирование Робот телеприсутствия DORA дает невероятное ощущение реальности
Робот телеприсутствия DORA дает невероятное ощущение реальности Сенсор LIDAR за 100$
Сенсор LIDAR за 100$ Сенсор, который превратит ваш телефон в 3D-сканер
Сенсор, который превратит ваш телефон в 3D-сканер Оптические энкодеры
Оптические энкодеры Классификация датчиков
Классификация датчиков Самокалибровка при измерениях
Самокалибровка при измерениях ToF и технологии машинного зрения
ToF и технологии машинного зрения
Как я понимаю этот чип сможет заменить энкодеры?
Было бы не плохо...
Не, это не замена энкодерам. Это дополнение к ним. Энкодеры (линейные или угловые) позволяют определить локальную координату какого-либо блока или устройства (угол или скорость вращения мотора, положение печатающей головки в принтере и прочее). Энкодеры потенциально могут давать очень высокую точность. При помощи датчиков инерциальной навигации (акселерометра, магнитометра, гироскопа) определяют ускорение всего объекта, на котором установлены эти датчики (тележка, квадрокоптер, катер) и его угловые скорости, а уже, используя эти данные, вычисляются координаты объекта, его скорость, пройденный путь, курс. Данные с инерциальных датчиков (магнитометра, акселерометра, гироскопа) необходимо отфильтровать (очистить от шума) и использовать совместно для вычисления координат. Часто для решения этих задач используют разновидности фильтра Калмана (для очистки данных от шума) и комплиментарный фильтр для объединения данных с различных датчиков. Существует множество различных алгоритмов и многие — достаточно сложные в реализации. Сначала считываются «сырые» данные с сенсоров, а затем их обрабатывают программно на микроконтроллере/микропроцессоре. Fairchild решил упростить задачу разработчикам и реализовал обработку данных с датчиков уже на аппаратном уровне, используя продвинутые методы. На выходе с сенсора мы, фактически, уже получаем ориентацию объекта в пространстве в цифровом виде.