
Как выбрать подходящие двигатели для колесного робота? Ответить точно на этот вопрос в начале конструирования робота непросто. Для этого нужно знать вес робота, а он еще не построен. Однако, технические характеристики и размеры двигателей значительно влияют на окончательные параметры мобильного робота. Для того, чтобы получить полную информацию, необходимо учесть вращающий момент, скорость и мощность. Для колесного робота также необходимо подобрать диаметр колес и определить правильное передаточное число зубчатой передачи для расчета скорости его движения.
Крутящий момент
Крутящий момент двигателя - это сила, с которой он воздействует на вращаемую ось. Для того, чтобы робот мог двигаться, необходимо, чтобы эта сила превышала вес робота (выражаемый в Н/м).
Некоторые употребляют вместо понятия крутящий момент, термин вращающий момент. По сути это одно и то же. И то и другое являются моментами, просто в технике крутящий момент — это нагрузка на колесе, а вращающий момент — нагрузка в технической науке под названием «Сопротивление материалов».
Рассмотрим сильно упрощенную идеализированную модель колесного робота.
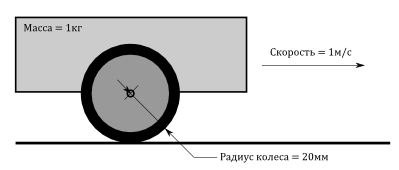
В нашем случае, вес робота равен 1кг, и мы хотим добиться максимальной скорости его движения 1м/с при радиусе колеса равном 20мм.
При движении по прямой на расстояние 1м, рассчитаем ускорение, необходимое для достижения скорости в 1м/с.
![\[v^2 = v_0^2 + 2ad\]](https://quicklatex.com/cache3/41/ql_759ae940d492d5a52ff7a8a668155741_l3.png "Rendered by QuickLaTeX.com")
где  — расстояние, пройденное роботом,
— расстояние, пройденное роботом,  — его начальная скорость (стартуем с места, поэтому
— его начальная скорость (стартуем с места, поэтому  ),
),
![\[a = \frac{v^2-v_0^2}{2d}\]](https://quicklatex.com/cache3/e6/ql_ab8399bcbef17632d10386eb56d527e6_l3.png "Rendered by QuickLaTeX.com")
где  — скорость робота,
— скорость робота,  -его ускорение.
-его ускорение.
Подставим значения, принятые в нашей модели, получим
 м/с2
м/с2
Вращающий момент, который необходим для перемещения робота и получения им ускорения, необходимого для достижения максимальной скорости рассчитывается следующим образом:
![\[M = J\alpha\]](https://quicklatex.com/cache3/93/ql_a618e0f33880e9ba059033a693404393_l3.png "Rendered by QuickLaTeX.com")
При  — момент инерции и
— момент инерции и  — угловое ускорение, получим
— угловое ускорение, получим
![\[M = \frac{m g r a}{2}\]](https://quicklatex.com/cache3/32/ql_281fb2c30c1b12a25bc8934a8d8bb332_l3.png "Rendered by QuickLaTeX.com")
Здесь  м/с2 — ускорение свободного падения (округлим его до 10),
м/с2 — ускорение свободного падения (округлим его до 10),  — радиус колеса,
— радиус колеса,  — масса всего робота
— масса всего робота
Подставив значения, получим
 мН·м
мН·м
Для перевода величины, выраженной в Н·м в кг·см нужно учесть, что 1Н = 0.102 кг и 1м = 100 см. Поэтому 50 мН·м = 50 · 0.102 : 1000 * 100 = 0.51 кг · см.
Полученный крутящий момент распределяется между двумя двигателями робота и его еще нужно поделить на передаточное число используемой зубчатой передачи (подробнее про зубчатые передачи можно почитать здесь).
Мощность
Для расчета максимальной мощности двигателей нам понадобится частота вращения, которая выражается в оборотах в минуту
 (об/мин) =
(об/мин) = 
или в радианах в секунду
(рад/с) = 
через круговую частоту 
Подставив радиус колеса, получим
 рад/с
рад/с
или
 об/мин.
об/мин.
Мощность двигателей пропорциональна крутящему моменту и частоте вращения:
![\[P = M \times \nu\]](https://quicklatex.com/cache3/fa/ql_f9f73fef2682639117ddaa955a5913fa_l3.png "Rendered by QuickLaTeX.com")
Подставив сюда формулы для крутящего момента и частоты, получим:
![\[P = \frac{m g r a}{2} \times \frac{\omega}{r} = \frac{m g \omega a}{2}\]](https://quicklatex.com/cache3/44/ql_0cc364e27a28563854e54b1a25962744_l3.png "Rendered by QuickLaTeX.com")
Используя собственные значения, получим
 Вт
Вт
Опять же, мы получили суммарную мощность для всех двигателей, в нашем случае двигателя два, поэтому необходимо разделить результат на два и, как и в случае с расчетом крутящего момента, если используются зубчатые передачи, разделить на передаточное число зубчатых передач.
Обратите внимание, что мы рассчитали механическую мощность вырабатываемую двигателями, а не электрическую мощность, которую они потребляют. Необходимо учитывать КПД двигателей, который будет отличаться в зависимости от модели двигателя. Выбирать нужно двигатели, естественно, с бóльшим КПД.
Для обеспечения оптимальных характеристик лучше использовать двигатели с запасом по мощности, как минимум в два раза.
Для нашего примера двухколесного робота, с использованием передаточного числа равного 10, характеристики устанавливаемых двигателей должны быть следующими:
- частота вращения — 477 · 10 ≈ 5000$ об/мин
- вращающий момент — 50 мН·м/10 = 5 мН·м
- электрическая мощность — 5 Вт (я взял КПД равный 90%)
[add_ratings]
Еще по этой теме
 Шаговый двигатель 28BYJ-48 с драйвером ULN2003 и Arduino UNO
Шаговый двигатель 28BYJ-48 с драйвером ULN2003 и Arduino UNO Как работают шаговые двигатели
Как работают шаговые двигатели Motor Shield
Motor Shield Видеоурок 5. Моторы и транзисторы
Видеоурок 5. Моторы и транзисторы Endurance запустил компанию на Indiegogo
Endurance запустил компанию на Indiegogo Комплект разработчика для камеры RealSense
Комплект разработчика для камеры RealSense Использование смартфона проекта Tango от Google в мобильных роботах и БПЛА
Использование смартфона проекта Tango от Google в мобильных роботах и БПЛА Соревнования по робототехнике в США от лица судьи
Соревнования по робототехнике в США от лица судьи Классификация датчиков
Классификация датчиков Диснеевский робот создает огромные рисунки на пляже
Диснеевский робот создает огромные рисунки на пляже
Здорово) ещё бы по летающим такой тутор)
До квадрокоптеров и вертолетов руки у меня пока не дошли. Впишу в планы на будущее 🙂
Мда, перемножаем удавов на попугаев получаем Н*М.