
Очередной видеоурок, посвященный Arduino. В этом уроке рассмотрено использование транзисторов, моторов постоянного тока и сервоприводов в схемах на базе Arduino. В конце урока приводится пример управления сервой, используя инфракрасный дальномер. Но прежде чем перейти к уроку, я хотел бы рассказать чем отличаются моторы постоянного тока и сервоприводы.
Чем сервы отличаются от моторов
В англоязычной литературе двигатель постоянного тока пишется как DC-motor.
Двигатель постоянного тока имеет двухпроводное подключение. Вся мощность, потребляемая мотором передается по этим двум проводам. Мысленно можно представить его в виде лампочки (просто как нагрузка, подключенная к источнику питания). При включении двигателя постоянного тока он просто начинает вращаться. Большинство двигателей постоянного тока имеют достаточно большие скорости вращения — порядка 5000 об/мин (английская абревиатура — RPM, rounds per minute).

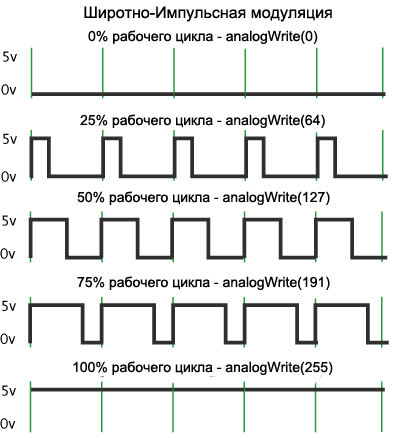
Скоростью двигателя постоянного тока, можно управлять (или, точнее, управлять уровнем мощности) используя метод широтно-импульсной модуляции, или просто ШИМ. Это идея управлением уровня мощности мотора заключается во включении и выключении его на короткие промежутки времени. Ключевым понятием здесь является рабочий цикл — процент времени, когда двигатель работает, по отношению ко времени, когда напряжение на него не подается. Если питание подается только половину времени, двигатель работает на половину своей рабочей мощности.
Если включать-выключать питание достаточно быстро, то будет казаться, что двигатель просто вращается с меньшей скоростью - без рывков. Меньшая скорость вращения обусловлена тем, что двигатель получает питание только часть общего времени работы. Это то, как используется ШИМ для управления мощностью двигателей постоянного тока.
Серводвигатель (сервомотор, серва, сервопривод) - это совершенно другая история. Серводвигатель фактически состоит из четырех элементов - это двигатель постоянного тока, зубчатый редуктор, позиционно-чувствительный элемент (аналог потенциометра — регулятора громкости), и схемы управления.
Сервопривод — это привод, управляемый через отрицательную обратную связь, что позволяет точно управлять параметрами движения.
Сервопривод получает сигнал управления, который определяет требуемое положение вала сервопривода и подает питание на двигатель постоянного тока до тех пор, пока его вал не повернется в это положение. Он использует устройство измерения положения, чтобы определить угловое положение вала, поэтому он знает, в какую сторону двигатель должен обратиться, чтобы переместить вал в заданное положение. Вал обычно не вращается свободно, как в двигателе постоянного тока, а может только повернуться, например, максимум на 200 градусов назад или вперед. Максимальный угол поворота сервы является одним ее важных параметров.

Сервопривод имеет трехпроводное подключение: питание, земля, и управление. Питание от источника должно подаваться постоянно; сервомотор имеет свою управляющую электронику, которая позволяет получить необходимую мощность для управления двигателем.
Сигнал управления, как и в случае с двигателем постоянного тока, представляет собой ШИМ-сигнал, но продолжительность положительного перепада определяет положение вала сервопривода (в случае двигателя постоянного тока мы управляем скоростью). Например, импульс, продолжительностью 1.520 мс определяет центральное положение для сервы Futaba S148. Длинный импульс заставляет сервопривод повернуться по часовой стрелке от центра, а более короткий импульс поворачивает сервопривод в фиксированное положение против часовой стрелки от центра.
Cервопривод повторяет управляющий импульс каждые 20 миллисекунд. В сущности, каждые 20 миллисекунд мы говорим сервомотору встать в определенное положение.
Есть два важных различия между управляющими импульсами для серводвигателя и двигателя постоянного тока.
- для серводвигателя, рабочий цикл (отношение времени работы к времени выключения) не имеет особого значения, важна только абсолютная продолжительность положительного перепада, который и определяет выходное положение вала сервопривода.
- сервопривод имеет свою силовую электронику, так что через управляющий сигнал течет очень мало энергии. Вся рабочая мощность потребляется по силовому проводу, который должен быть просто подключен к источнику положительного напряжения в 5 вольт.
Сравните это с двигателем постоянного тока. Двигатель постоянного тока как лампочка, он не имеет собственной управляющей электроники и требует большого тока управления. Это функция реализована в драйвере L293D, который выступает в качестве переключателя большого тока для управления электродвигателями постоянного тока.
Видеоурок
В этом видеоуроке Джереми Блюм рассказывает что такое транзистор и как он используется для управления моторами постоянного тока. В данном случае транзистор выступает в качестве ключа, подключая источник питания к двигателю и отключая его. Это позволяет потреблять больший ток, чем если бы подключили двигатель к выходам Arduino.
Приводятся примеры управления двигателем постоянного тока и сервоприводом при помощи Arduino. Показано, как управлять положением сервопривода, используя инфракрасный дальномер.
Термин «рельса», употребляемый переводчиком следует слышать как «шина».
Смотрим видео.
Часть 1
Часть 2
Возникнут вопросы — рад буду ответить.
[add_ratings]
Еще по этой теме
 Motor Shield
Motor Shield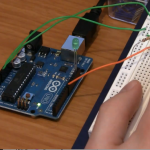 Видеоурок 2. Arduino — кнопки, PWM, функции
Видеоурок 2. Arduino — кнопки, PWM, функции  Шаговый двигатель 28BYJ-48 с драйвером ULN2003 и Arduino UNO
Шаговый двигатель 28BYJ-48 с драйвером ULN2003 и Arduino UNO Как работают шаговые двигатели
Как работают шаговые двигатели Прерывания на Arduino
Прерывания на Arduino Arduino в качестве подписчика ROS
Arduino в качестве подписчика ROS Часы реального времени (RTC) и Arduino
Часы реального времени (RTC) и Arduino Arduino как издатель ROS
Arduino как издатель ROS Arduino и ROS — первый шаг
Arduino и ROS — первый шаг Оптимизируем digitalWrite на Arduino
Оптимизируем digitalWrite на Arduino
Для чего ставят конденсатор?)
Роман, у вас очень хороший вопрос! Джереми Блюм считает, что конденсатор ставится для гашения помех, вызванных работой двигателя. Это отчасти правильно. Второе назначение конденсатора, такое же как у диода — гашение ЭДС самоиндукции. Этой теме мне стоит посвятить отдельную статью. Сегодня опубликую развернутый ответ.
Решил я вместо статьи обойтись ссылкой 🙂
roboforum.ru/forum11/topic6902.html
Диод шунтируют конденсатором также для его защиты. Включение конденсатора параллельно p-n переходу позволяет устранить резкие колебания напряжения, вследствие чего, из-за инерции перехода, в ШИМ-схемах происходит нагрев полупроводникового кристалла, что может привести к его разрушению.
И, конечно, борьба с высокочастотными помехами.
Какие транзисторы лучше использовать для работы с напряжением в 5-7 В и силой тока 0,5 — 2 А?
Подходят отечественные КТ-317Г или его импортный аналог TIP31C производства Fairchild. Это в выводном корпусе ТО220. Можно выбрать любые NPN-типа с параметрами: Ik_max > 3А, Pk > 15Вт, Uкбо макс > 10В, Uкэо макс > 10В.
Доброго времени суток!
Занимаюсь конструированием своего квадрокоптера, встретился с таким явлением, как:
при подключении мотора напрямую к батарее он крутится с достаточной скоростью для взлета, но как только использую схему с использованием транзистора для того, чтобы управлять оборотами мотора и вообще говоря стабилизацией квадрокоптера во время полета — обороты двигателя становятся настолько маленькими, что ни о каком полете речь не идет.
Подскажите, что я делаю не так, и что надо изменить в схеме, чтобы мотор крутился с такой же мощностью, как и при подключении его напрямую к источнику питания.
Спасибо!
Можно ли использовать ардуино вместо тсм модуля (блок управления коробкой передач)