Вычисление прямой кинематики зачастую является жизненно важным первым шагом к использованию нового робота в исследованиях. Несмотря на то, что в Интернете можно встретить множество хороших учебников, до сих пор не было простого пошагового руководства для расчета прямой кинематики. Ниже представлена простая инструкция вместе с некоторыми советами по расчету кинематики любого манипулятора робота.
Расчет кинематики является краеугольным камнем среди навыков инженеров, занимающихся робототехникой. Кинематика требует усилий, однако, задача «пойти и рассчитать прямую кинематику» в большинстве робототехнических исследований сокращается до «пойти и познакомиться с этим роботом». Это важный первый шаг при использовании нового робота в научных исследованиях, в частности, если дело касается манипуляторов.
Даже, если вы изучали расчет кинематики, учась в университете, процесс расчета не ощущается интуитивно, пока вы несколько раз не произведете расчет кинематических решений, занимаясь реальными исследованиями роботов. И если вы не занимаетесь такими расчетами ежедневно, то обязательно понадобится шпаргалка по этому процессу. Было бы действительно полезно иметь под рукой пошаговое руководство с напоминанием, через какие этапы необходимо пройти, не занимаясь чтением сотен страниц с уравнениями в академических учебниках.
Ниже представлена такого рода шпаргалка. В настоящий момент мы сосредоточимся на подходе Деванита-Хартенберга (Devanit-Hartenberg, далее, сокращенно Д-Х) для прямой кинематики, который используется наиболее часто, а в дальнейшем, возможно, рассмотрим и обратную кинематику.
Шаг 1. Возьмите ручку и лист бумаги
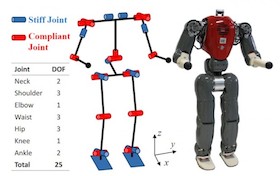
Вам, возможно, сразу же захочется перейти к работе за компьютер для запуска нового робота. Однако, даже если робот выглядит как стандартный 6R-манипулятор (который имеет 6 вращающихся шарниров), то, все равно, лучше взять в руки ручку и лист бумаги и изобразить на нем кинематическую схему. Эта простое действие поможет вам внимательно рассмотреть фактическую физическую конфигурацию робота, избегая ошибочных предположений, которые могут привести в итоге, к неверному программному коду для управления роботом.
Существует множество различных способов, каким образом можно изобразить кинематичесиую связь. Выбирете наиболее удобный для вас стиль. Одним из вариантов может быть изображение цилиндров для шарниров и линий для соединений. Можно воспользоваться поиском картинок в Интернете с ключевыми словами «kinematic diagram» или «кинематическая схема» и посмотреть на различные варианты изображения таких схем.
Для каждого шарнира изобразите на схеме направления вращения шарниров, используя для этого круговые линии со стрелками на концах.
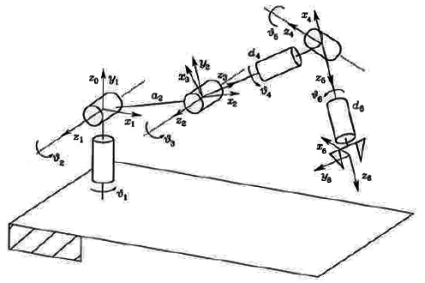
Шаг 2. Изобразите оси
Следующим шагом будет изображение осей в каждом соединении. В подходе Д-Х каждому суставу назначаются различные оси.
При правильной установке осей с роботом будет легко работать. И наоборот — неправильно установленные оси приведут к множеству различных проблем в дальнейшем. Эти оси требуются симуляторам, вычислителям инверсной кинематики и даже другим исследователям (никто не захочет решать прямую кинематическую задачу, если она уже кем-то решена).
Ось Z должна совпадать с осью вращения или с направлением, вдоль которого происходит удлинение в призматическом суставе. Ось X должна пролегать вдоль «общей нормали», являющейся кратчайшей ортогональной линией между предыдущей осью Z и текущей осью Z. На видео паказано как их построить:
В частности, можно изображать оси, используя следующую цветовую палитру: ось Z — синим, ось X — красным и ось Y — зеленым. Эта цветовая схема используется в визуализаторе RViz , входящим в состав ROS. Также можно взять кусок пластелина, воткнуть в него три разноцветных соломинки в соответствии с выбранными направлениями и, поднеся к роботу, убедиться, что все было сделано корректно и оси указывают в правильном направлении. Не лишним будет воспользоваться удобным виртуальным инструментом.
Шаг 3. Вспомните как выглядит рабочий орган
Целью вычисления прямой кинематики является расчет позиции конечного элемента (рабочего органа), используя позиции суставов.
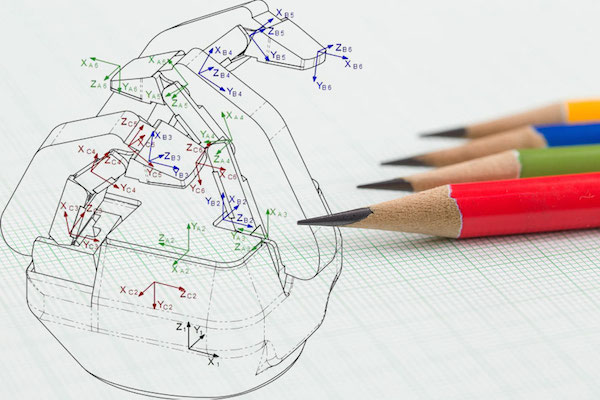
Большинство учебников, описывающих прямую кинематику, рассматривают рабочий орган как единственное расстояние от последнего шарнира. Это нормально в случае простого захвата вида «открыть-закрыть». Однако, большинство современных захватов представляют собой более сложные механизмы и стоит обратить пристальное внимание на то, как функционирует рабочий орган. Например, устройство 3-finger adapive gripper компании Robotiq, имеет несколько различных режимов захвата. В каждом режиме мы будем получать несколько отличающиеся позиции рабочего органа. Поэтому, при разработке кинематической модели необходимо тщательно рассмотреть рабочий орган.
Шаг 4. Рассчитайте параметры Денавита-Хартенберга
Параметры Денавита-Хартенберга часто требуются, чтобы занести модель робота в симулятор и начать производить в нем какой-либо анализ.
Очень хорошо параметры Д-Х показаны в представленном на шаге 2 видео. Уделите чуть больше времени для понимания этих параметров.
В методе Д-Х описывается каждый сустав робота, используя 4 параметра, каждый из которых имеет отношение к предшествующему шарниру. Они рассчитываются относительно «общей нормали», упомянутой выше. Необходимо отметить, что если предшествующая ось Z пересекается с текущей осью Z, что бывает достаточно часто, то «общая нормаль» имеет нулевую длину.
- d — расстояние между предшествующей осью Z и текущей осью Z вдоль общей нормали
- θ — угол вдоль оси Z между предшествующей осью X и текущей осью X.
- a (или r) — длина общей нормали
- α — угол вокруг общей нормали между предшествующей осью Z и текущей осью Z
Пройдите через каждый шарнир на вашем рисунке и запишите параметры Д-Х для каждого сустава. Более подробно и с примерами расчета рассмотрено здесь и здесь.
Альтернативы параметрам Денавита-Хартенберга
Метод Д-Х является наиболее распространенным подходом прямой кинематики, но он не совершенен. Один из его недостатков является то, что он не очень элегантно обрабатывает параллельные оси Z. Есть различные альтернативные методики, в их числе представление винтового исчисления, Хаяти-Робертса и другие виды геометрического моделирования (статья Modeling Robotic Arms – A Review and Derivation of Screw Theory Based Kinematics). Хотя они могут (а возможно — и нет) быть более подходящими, большинство из представленных ниже библиотек для кинематики, принимают параметры Д-Х, поэтому, разумным будет начать именно с них.
Шаг 5. Выберите библиотеку
Существует множество программных библиотек для работы с кинематикой и многие из них делают гораздо больше, чем просто производят расчет прямой кинематики. Большинство из них включают решатели инверсной кинематики, динамику, визуализацию, планирование движения и определение коллизий, и это — только некоторые их возможности. Эти библиотеки преобразуют параметры Д-Х в матрицы, которые затем перемножаются для расчета относительных позиций шарниров и позиции рабочего органа.
Конечно, вы также можете реализовать собственную библиотеку для прямой кинематики на предпочитаемом вами языке программирования, что помогает лучше понять все механизмы алгоритма и даст вам множество других преимуществ.
Некоторые библиотеки:
- Robotics Library
- Orocos Kinematics and Dynamics Library
- ROS MoveIt
- OpenRave
- RoboAnalyzer
- Matlab Robotics Toolbox
Хотя вам, на самом деле, потребуется еще и обратная кинематика для управления роботом, вычисление прямой кинематики является необходимым шагом для того, чтобы ознакомится с любой новой роботизированной рукой.
Источник: robohub.org
[add_ratings]
Еще по этой теме
 Создайте романтическую плату с помощью бесплатного инструмента разработки EasyEDA
Создайте романтическую плату с помощью бесплатного инструмента разработки EasyEDA Матрица принятия решений
Матрица принятия решений Процесс проектирования в робототехнике
Процесс проектирования в робототехнике Описание движения мобильного робота
Описание движения мобильного робота Компьютеры впервые выиграли в покер
Компьютеры впервые выиграли в покер Трекинг глаз водителя для управления фарами
Трекинг глаз водителя для управления фарами Робошкола-2014 завершилась, а жаль 🙁
Робошкола-2014 завершилась, а жаль 🙁 LIDAR за 250$ для роботов, автомобилей и многого другого
LIDAR за 250$ для роботов, автомобилей и многого другого Первый скетч для Kinect
Первый скетч для Kinect Третье измерение в Processing
Третье измерение в Processing