
Существует два основных подхода к вопросу о создании роботизированной руки. Можно создать роботизированную руку с простыми прямолинейными движениями, имеющую два или три пальца для захвата большинства предметов. Или достаточно сложную, со всеми пятью пальцами, предназначенную для полной имитации человеческих рук, прошедших миллионы лет эволюции. И такую руку удалось разработать, так что если вы хотите, чтобы ваш робот выполнял как можно больше движений и обладал человекоподобной рукой, то теперь это стало возможным.
Из-за сложного строения настоящей человеческой руки, биомиметические антропоморфные руки неизбежно сопряжены с большим количеством проблем: нужно заставить их работать определенным образом и сохранить форму человеческой руки. Zhe Xu и Emanuel Todorov из Вашингтонского Университета в Сиэтле совершили безумие и создали наиболее точную биомиметическую антропоморфную роботехническую руку, какую можно себе представить, для того, чтобы полностью заменить человеческую.
По словам Zhe Xu, для них было очень важно разработать новый вид робототехнической руки:
«Традиционный подход к проектированию антропоморфной робототехнической руки предполагает механизацию биологических частей с использованием шарниров, тяг, подвесов для значительного упрощения. Этот подход, несомненно, полезен для понимания и аппроксимации кинематики человеческой руки в целом, но неизбежно вносит диссонанс между роботизированной и человеческой рукой, так как большинство важных биомеханических особенностей человеческой руки не принимаются во внимание в процессе механизации. Присущее несоответствие между механизмами роботизированной руки и биомеханикой руки человека, по сути, мешает нам использовать естественные движения руки, чтобы управлять напрямую. Таким образом, в настоящее время нет ни одной антропоморфной роботизированной руки, которую можно в полной мере сравнить с человеческой».
Xu и Todorov решили начать с нуля, машинально дублируя движения человеческой руки.
Сначала они просканировали лазером скелет человеческой руки, а затем напечатали на 3D-принтере искусственные кости, что позволило им продублировать незафиксированные совместные оси, которые у нас есть. По словам Xu:
«Например, движения большого пальца опираются на сложную форму трапецевидной кости, расположенной в запястно-пястном суставе кисти. Из-за неправильной формы трапецевидной кости, точное расположение совместных осей запястно-пястного сустава не является фиксированным. Таким образом, ни один из существующих образцов антропоморфной роботехнической руки не может воспроизвести естественные движения большого пальца, так как обычные механические соединения требуют фиксированной оси вращения. С помощью лазерного сканирования модели человеческой руки и 3D печати искусственных суставов пальцев, мы получили диапазон движения, жесткости и динамических характеристик, очень близкий к человеческим аналогам. Наша роботизированная рука однозначно сохраняет важную биомеханическую информацию на анатомическом уровне».
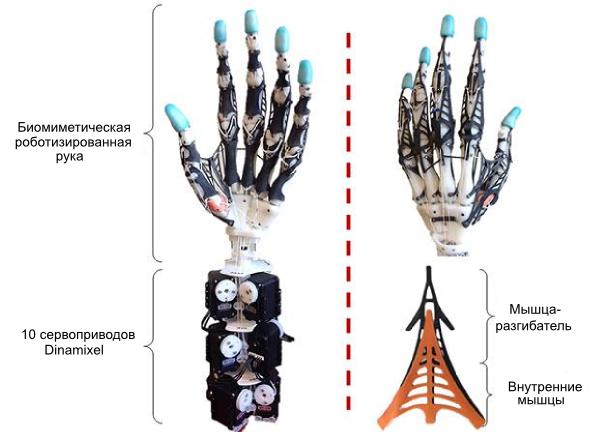
Суставные связки (которые стабилизируют суставы и контролируют диапазон их движений) изготовлены из высокопрочных волокон Spectra, с использованием лазерной резки листов резины, заменяющих мягкие ткани. Разгибатели и сгибатели сухожилий (для сгибания и выпрямления пальцев) также изготовлены из волокон Spectra и резиновых листов методом лазерной резки для обшивки сухожилий и мышцы-разгибателя, представляющую собой сложную перепончатую многослойную структуру, которая оборачивается вокруг пальцев, чтобы лучше управлять гибкостью и крутящим моментом. Мышцы состоят из массива 10 сервоприводов Dynamixel, тросы от которых которых проложены таким образом, чтобы точно имитировать запястье человеческой руки.
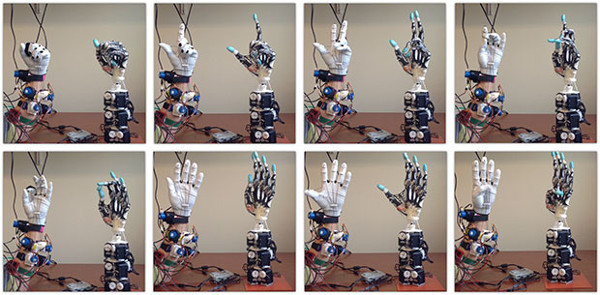
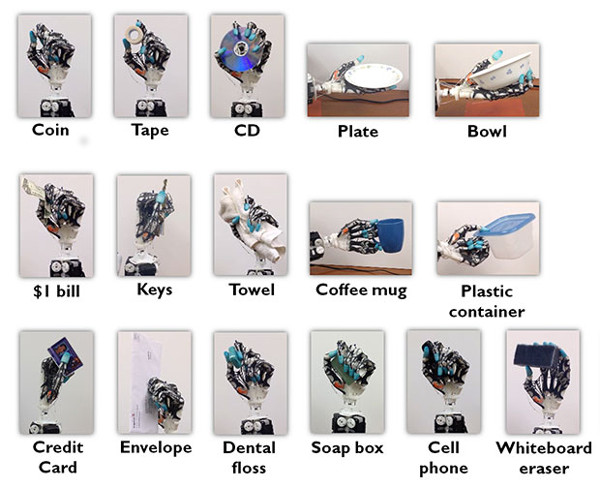
Помимо того, что это практически произведение искусства, рука способна очень точно имитировать разнообразные хватки при управлении с дистанционного манипулятора. Операторы также могут выполнять сложные манипуляции рукой без обратной связи, так как кинематика руки совпадает с настоящей человеческой рукой.
Это настоящий прорыв: дело в том, что рука предназначена для имитации человеческой руки, и это означает, что она имитирует человеческую руку, в первую очередь, из-за своей конструкции, а не программирования. Это имеет массу потенциальных преимуществ в телеманипуляции, поскольку оператор может более органично использовать ловкость собственных рук.
Ученые предполагают, что их руки могут быть использованы «как 3D каркасы для регенерации конечностей». По словам Xu:
«Работа рук и ног существенно опирается на человеческий мозг. Поэтому технологии нейропротезирования могли бы стать намного более эффективными, если конструкция протеза больше походила на свой биологический аналог. Биосовместимые материалы теперь могут быть распечатаны в виде костных структур, биологически искусственные связки будут использованы для замены разорванной передней крестообразной связки, мышцы человека будут успешно культивированы в чашке петри (прозрачном лабораторном сосуде в форме плоского цилиндра), а периферические нервы также могут быть регенерированы при благоприятных условиях. Все эти перспективные технологии требуют подходящих каркасов для роста трансплантируемых клеток. Мы будем сотрудничать с учеными-биологами и исследователями тканевой инженерии для дальнейшего изучения перспектив и создания биоустройств, каркасов в развивающихся областях нейропротезирования и регенерации конечностей».
Разработка биомиметическая антропоморфной роботизированной руки для регенерации конечностей, созданной Zhe Xu и Emanuel Todorov из Вашингтонского Университета будет представлена на ICRA в Стокгольме в мае этого года.
Источник:spectrum.ieee.org
[add_ratings]
Еще по этой теме
 Андроид приглашает вас в зловещую долину
Андроид приглашает вас в зловещую долину Зловещая долина
Зловещая долина Люди и роботы в одной команде
Люди и роботы в одной команде Язык программирования Python и пакеты для машинного обучения и Data Mining
Язык программирования Python и пакеты для машинного обучения и Data Mining Зачем SoftBank покупает ARM?
Зачем SoftBank покупает ARM? Датчики в робототехнике
Датчики в робототехнике Первый скетч на Processing
Первый скетч на Processing Язык программирования Processing
Язык программирования Processing Как установить шрифт в Mac OS X
Как установить шрифт в Mac OS X Робошкола-2014 в Волгограде
Робошкола-2014 в Волгограде
Теперь нужно ногу с имитировать)