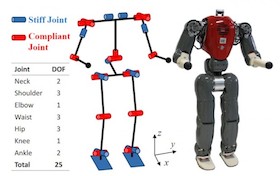
Кинематическая схема антропоморфного робота
5 шагов для расчета прямой кинематики роботов
Вычисление прямой кинематики зачастую является жизненно важным первым шагом к использованию нового робота в исследованиях. Несмотря на то, что в Интернете можно встретить множество хороших учебников, до сих пор не было простого пошагового руководства для расчета прямой кинематики. Ниже представлена простая инструкция вместе с некоторыми советами по расчету кинематики любого манипулятора робота.
